
Risk-Aware Autonomy Under Uncertainty
Nonlinear Probabilistic Planning, Control, Optimization, Estimation, and Learning Under Uncertainty for Autonomous Systems
Ashkan Jasour
© Ashkan Jasour, Last modified 2024-05
Contents:
1. Introduction
2. Mathematical Tools
3. Non-Gaussian Uncertainty Quantification
4. Risk-Aware Safety Verification
5. Risk-Aware Planning
6. Risk-Aware Control
7. Risk-Aware Optimization
8. Nonlinear Estimation
9. Risk-Aware Learning
10. Codes
11. How to Cite
1. Introduction:
Objective: This ongoing research aims to develop safe planning, control, and estimation algorithms for autonomous systems that account for uncertainties and nonlinear models and reason about probability of failure and success to ensure safety.
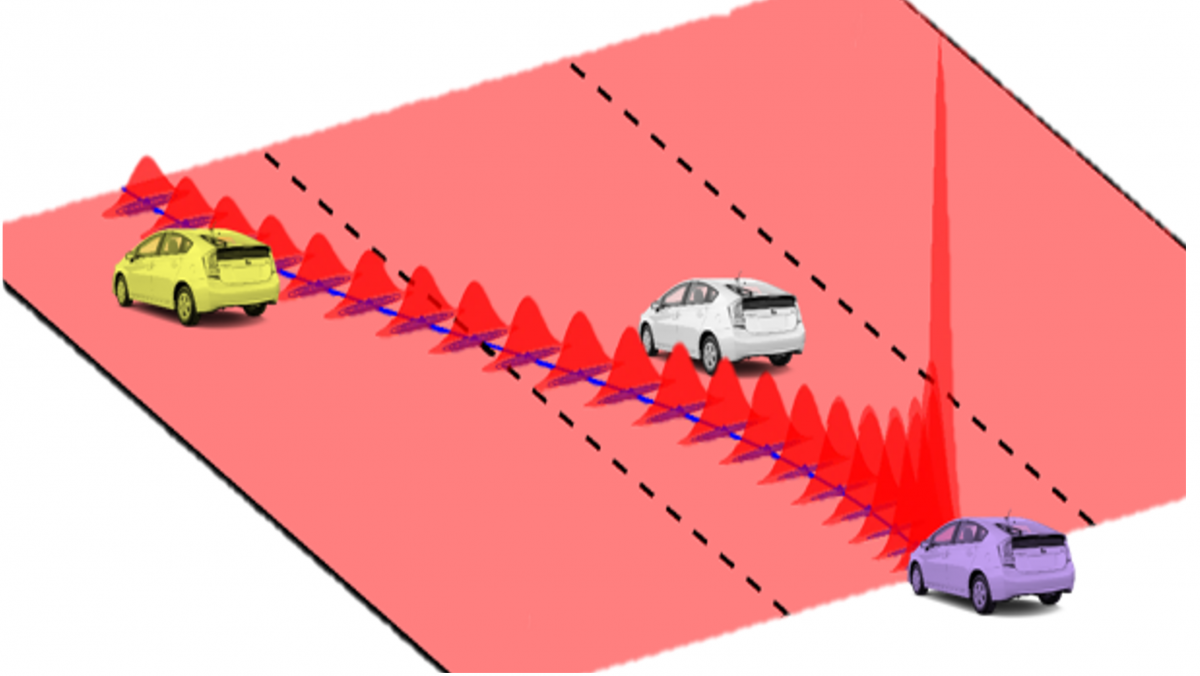
Probabilistic location of robot and unsafe area. Risk-aware algorithms reason about uncertainties and probability of failure and success.
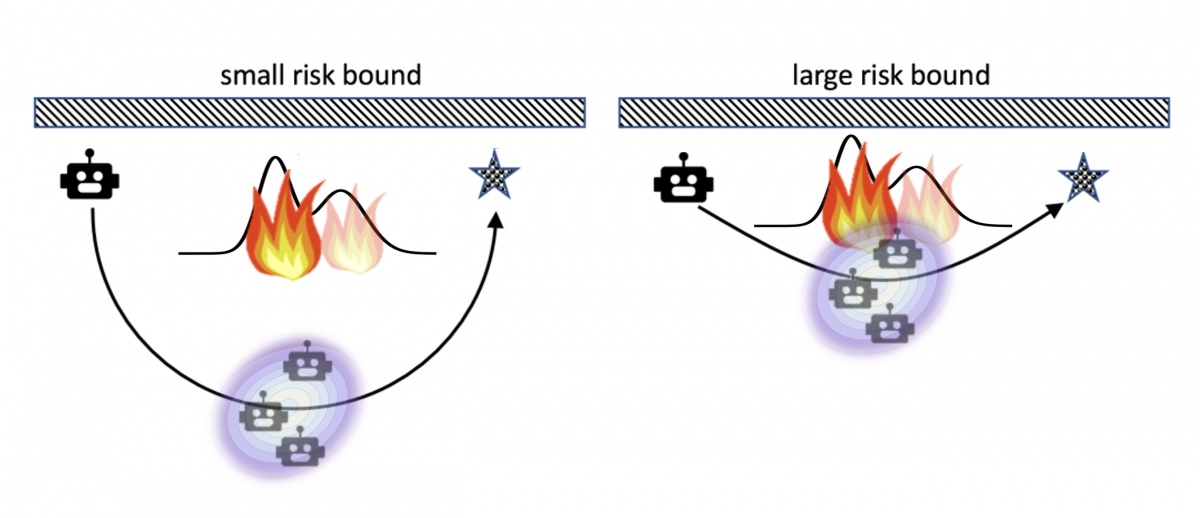
Acceptable risk level impacts the safety and optimality of the plan (trade-off between optimality and safety).
Existing Methods: Existing planning under uncertainty methods mainly fall into the following categories: i) Robust methods that work with worst-case planning scenarios and usually result in conservative plans, ii) Probabilistic methods that rely on simplified uncertainty characterization and risk models, e.g., Gaussian linear models, that introduce another source of uncertainty not captured by the planner, and iii) Sampling-based methods that are known to be computationally expensive.

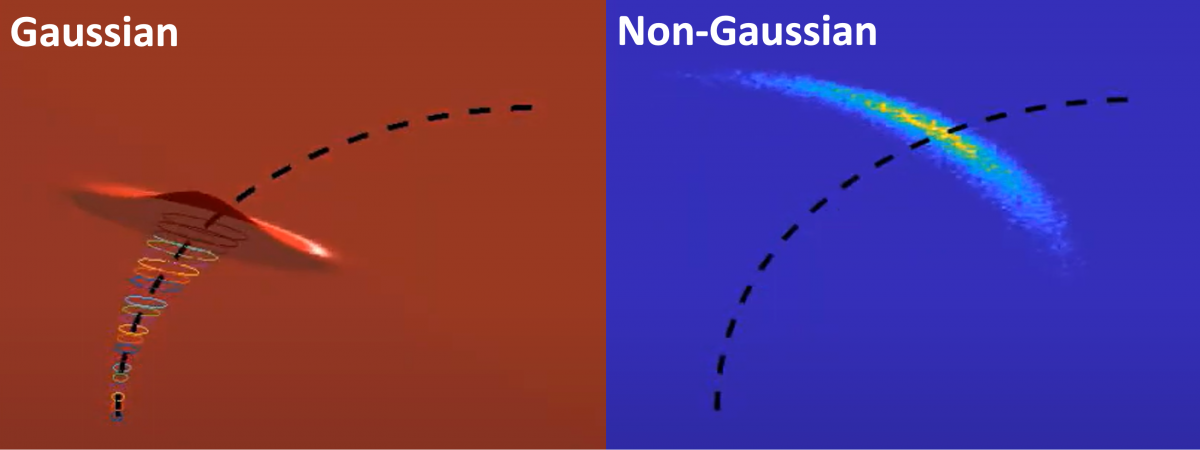
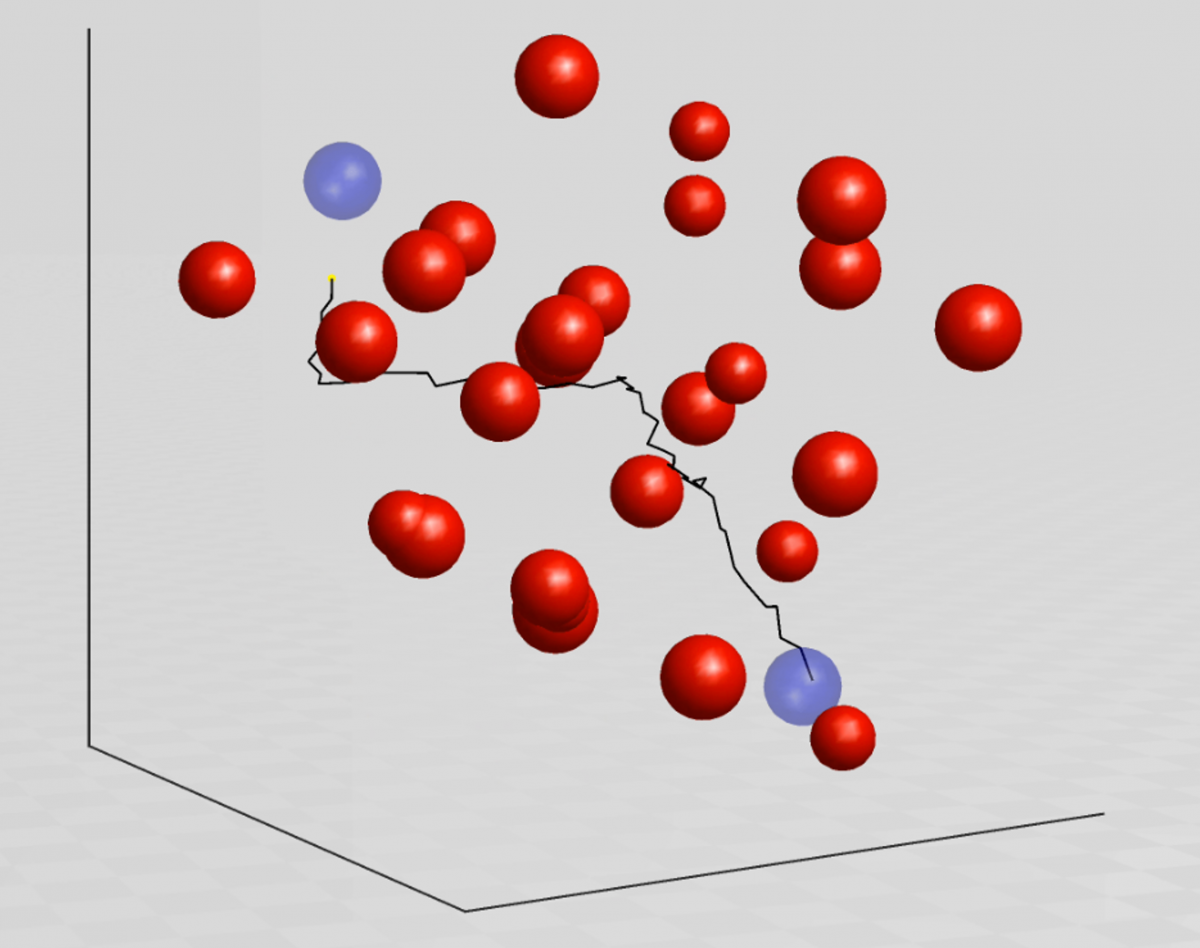
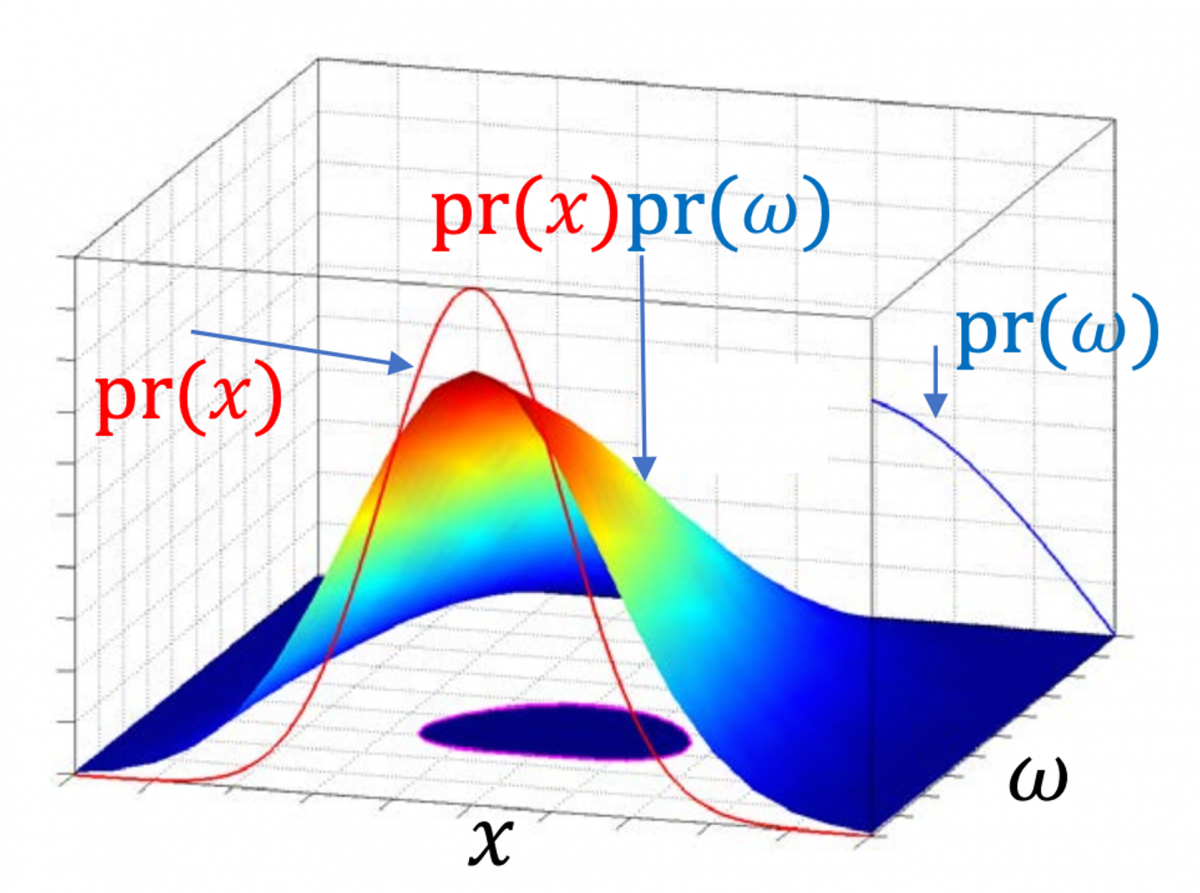
[Left: Sampling-based representation of uncertainties] Sampling-based methods use a large number of uncertainty samples in the planning process; Hence, they are computationally expensive and cannot guarantee the safety of the original uncertain system. [Middle: Gaussian approximation of uncertainties] Gaussian linear methods use linearized models and Gaussian approximation of the uncertainties and therefore they cannot guarantee the safety of the original uncertain system. [Right: Non-Gaussian uncertainties] We use nonlinear stochastic models where uncertainties are not necessarily Gaussian and generate plans with guaranteed bounded risk.
Challenges: 1) We need to deal with probabilistic/stochastic models and constraints, 2) Due to nonlinearities, probability distributions evolve into non-Gaussian distributions
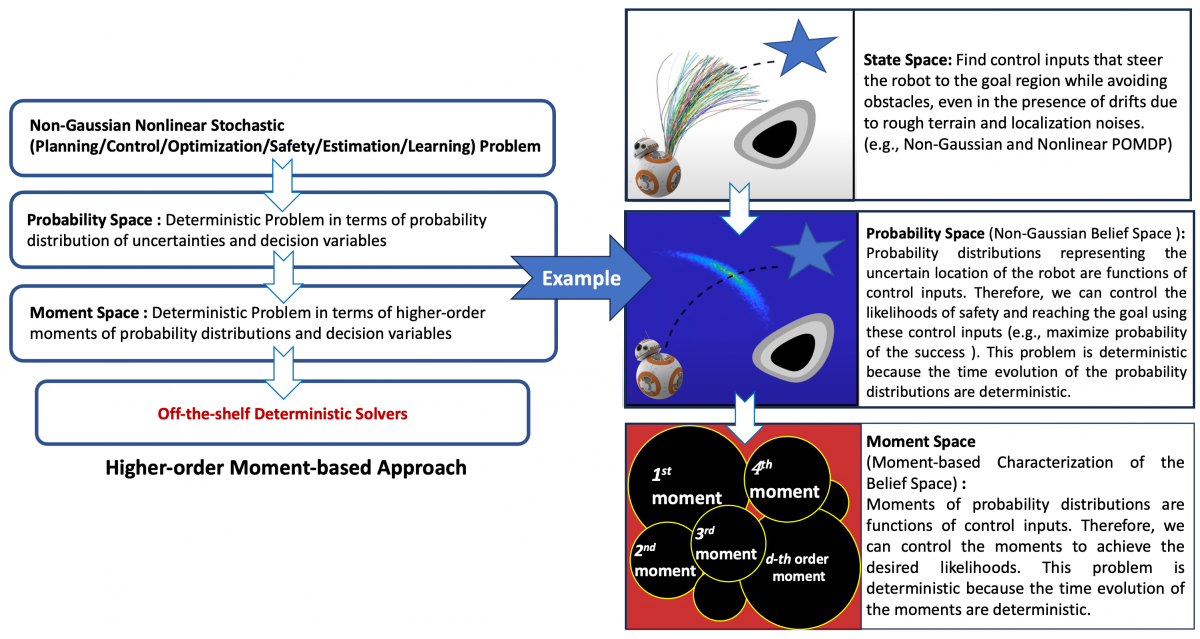
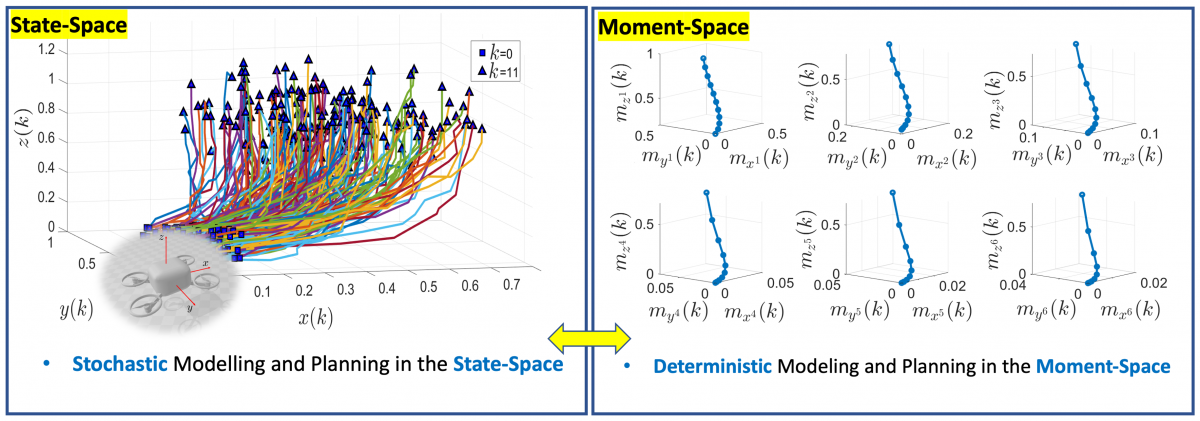
Approach: To address planning under uncertainty problems: 1) We first formulate the planning under uncertainty problem as a probabilistic nonlinear planning problem with stochastic nonlinear models and probabilistic constraints on random variables, 2) We use higher-order moments to represent non-Gaussian probability distributions, 3) We transform stochastic models and probabilistic constraints on random variables into a set of deterministic models and constraints on the moments of probability distributions, 4) Finally, we solve the resulting deterministic optimization problem using off-the-shelf solvers.

3. Non-Gaussian Uncertainty Quantification
-
Exact Non-Gaussian Uncertainty Propagation:
Moment-Based Exact Uncertainty Propagation Through Nonlinear Stochastic Autonomous Systems
-
Construct the uncertainty set from the moments information:
Ashkan Jasour, C. Lagoa, ”Reconstruction of Support of a Measure From Its Moments”, 53 rd IEEE Conference on Decision and Control, Los Angeles, California, 2014.
4. Risk-Aware Safety Verification
- Worst-Case Analysis for Stochastic Systems:
Jared Miller, Matteo Tacchi, Mario Sznaier, Ashkan Jasour,"Peak Value-at-Risk Estimation for Stochastic Differential Equations using Occupation Measures", IEEE Conference on Decision and Control (CDC), 2023
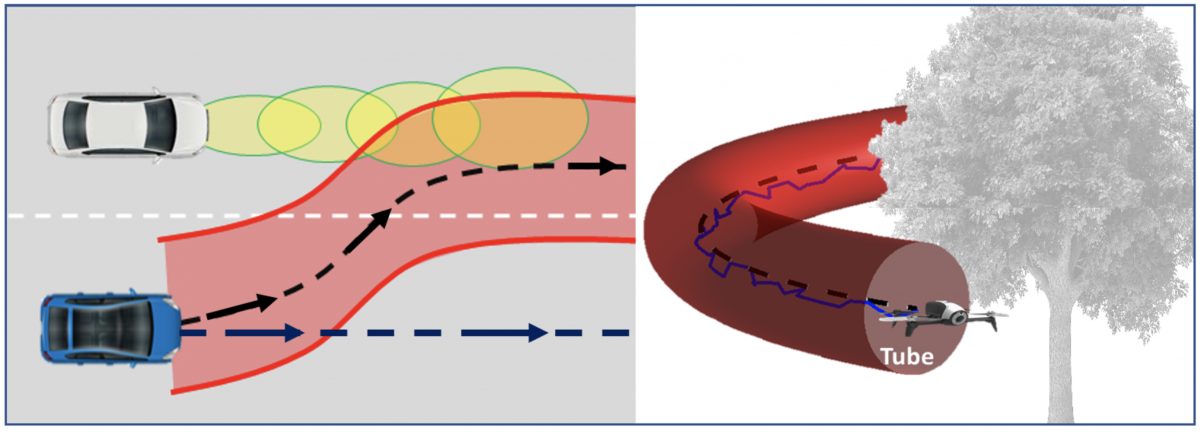
- Tube-based Trajectory Safety Verification in Stochastic Environments:
Ashkan Jasour, Weiqiao Han, Brian Williams, "Real-Time Risk-Bounded Tube-Based Trajectory Safety Verification Authors", The 60th IEEE Conference on Decision and Control, 2021.
- Fast Risk Estimation:
A Wang, X Huang, A Jasour, B Williams, "Fast Risk Assessment for Autonomous Vehicles Using Learned Models of Agent Futures", Robotics: Science and System (RSS), 2020.
- Risk-Aware Map To Identify The Unsafe Regions In The Stochastic Environments:
Ashkan Jasour, Brian C. Williams, "Risk Contours Map for Risk Bounded Motion Planning under Perception Uncertainties", Robotics: Science and System (RSS), Germany, 2019.
- Efficient Semidefinite Programming for Risk Estimation:
Ashkan Jasour, Andreas Hofmann, Brian C. Williams, "Moment-Sum-Of-Squares Approach for Fast Risk Estimation in Uncertain Environments", IEEE Conference on Decision and Control, 2018.
5. Risk-Aware Planning
-
Semidefinite Programming-based Continuous-Time Trajectory Planning in Stochastic Environments:
Ashkan Jasour, Weiqiao Han, Brian Williams,"Convex Risk Bounded Continuous-Time Trajectory Planning and Tube Design in Uncertain Nonconvex Environments" , The International Journal of Robotics Research (IJRR), 2023 -
Moment-Based Deterministic Motion Planning for Nonlinear Robotic Systems:
Sangli Teng, Ashkan Jasour, Ram Vasudevan, Maani Ghaffari,"Convex Geometric Motion Planning on Lie Groups via Moment Relaxation", Robotics: Science and Systems (RSS) 2023, Best Paper Award Finalists -
Real-Time Tube-based Risk bounded Planning for Stoachstic Nonlinear Systems:
Weiqiao Han, Ashkan Jasour, Brian Williams, "Real-Time Tube-Based Non-Gaussian Risk Bounded Motion Planning for Stochastic Nonlinear Systems in Uncertain Environments via Motion Primitives", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023. -
Risk Aware Planning Considering Uncertain Nonlinear Robot Model in Stochastic Environments:
Han, Weiqiao, Ashkan Jasour, and Brian Williams. "Non-Gaussian risk bounded trajectory optimization for stochastic nonlinear systems in uncertain environments." IEEE International Conference on Robotics and Automation (ICRA), 2022, Outstanding Planning Paper Award Winner
- Semidefinite Programming-based Continuous-Time Trajectory Planning in Stochastic Environments:
Ashkan Jasour, Weiqiao Han, Brian Williams,"Convex Risk Bounded Continuous-Time Trajectory Planning in Uncertain Nonconvex Environments", Robotics: Science and Systems (RSS), 2021.
- Trajectory Planning in The Presence of Mixture Models with Non-Gaussian Components:
A Wang, A Jasour, B Williams, "Non-Gaussian Chance-Constrained Trajectory Planning for Autonomous Vehicles in the Presence of Uncertain Agents", IEEE Robotics and Automation Letters (RA-L), 2020.
- Trajectory Planning in The Presence of Mixture Models with Non-Gaussian Components:
A Wang, A Jasour, B Williams, "Non-Gaussian Chance-Constrained Trajectory Planning for Autonomous Vehicles in the Presence of Uncertain Agents", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
- Chance-Constrained Partially Observable Markov Decision Process (CC-POMDP) Using AND-OR Heuristic Search Trees:
Xin Huang, Ashkan Jasour, Matthew Deyo, Andreas Hofmann, and Brian C. Williams, "Hybrid Risk-Aware Conditional Planning with Applications in Autonomous Vehicles", IEEE Conference on Decision and Control, 2018.
6. Risk-Aware Control
- Uncertainty Minimization Based Control of Stochastic Nonlinear Robotic Systems:
Weiqiao Han, Ashkan Jasour, Brian Williams, "Non-Gaussian Uncertainty Minimization Based Control of Stochastic Nonlinear Robotic Systems", International Conference on Intelligent Robots and Systems (IROS), 2023.Senidefinie Programming for Risk Aware Control:
Ashkan Jasour, "Risk Aware Nonlinear Planning And Control", INFORMS 2020
- Lecture Notes:
Ashkan Jasour, Risk Aware Planning and Control Of Probabilistic Nonlinear Dynamical Systems, 2019
- Tube-based Control of Stochastic Systems:
Ashkan Jasour, Brian C. Williams, "Sequential Convex Chance Optimization for Flow-Tube based Control of Probabilistic Nonlinear Systems", IEEE Conference on Decision and Control (CDC), 2019.
7. Risk-Aware Optimization
- Efficient Large-Scale Chance Constrained Optimization:
Ashkan Jasour, "Efficient Algorithms for Large-Scale Chance Constrained Problems", SIAM Conference on Optimization, Probabilistic Optimization and Control Symposium, 2021
- Semidefinite Programming for Chance Constrained Optimization - Primal and Dual Formulation:
Ashkan Jasour, "Moment-Sum-Of-Squares based Semidefinite Programming for Chance Constrained Optimization", LIDS-MIT, 2020.
- Application in Set Volume Optimization:
Ashkan Jasour, C. Lagoa, "Convex Constrained Semialgebraic Volume Optimization: Application in Systems and Control", 2017.
- Semidefinite Programming for Chance Optimization:
Ashkan Jasour, Necdet Serhat Aybat, and Constantino Lagoa ”Semidefinite Programming For Chance Constrained Optimization Over Semialgebraic Sets”, SIAM Journal on Optimization, 25(3), 1411–1440, 2015.
- Semidefinite Programming for Chance Optimization:
Ashkan Jasour, C. Lagoa, ”Semidefinite Relaxations of Chance Constrained Algebraic Problems”, 51st IEEE Conference on Decision and Control, Maui, Hawaii, 2012
8. Nonlinear Estimation
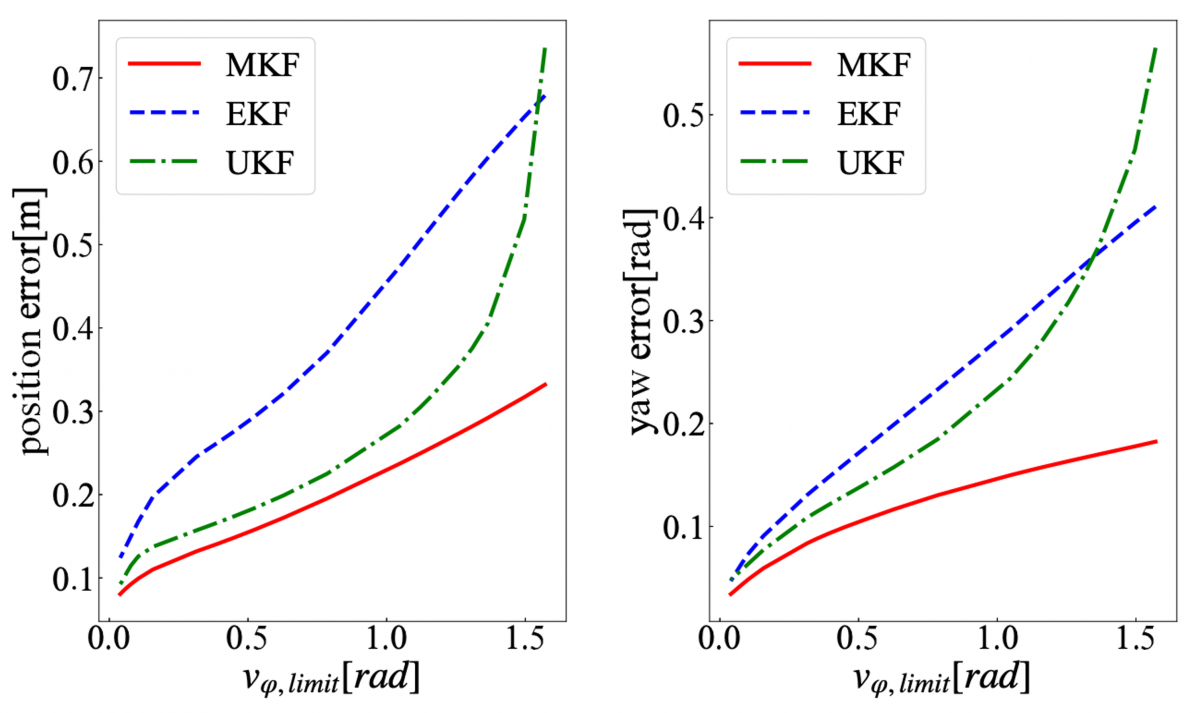
- Kalman Filter for Nonlinear Systems:
Shimizu, Yutaka, Ashkan Jasour, Maani Ghaffari, and Shinpei Kato. "Moment-based Kalman Filter: Nonlinear Kalman Filtering with Exact Moment Propagation", IEEE International Conference on Robotics and Automation (ICRA), 2023.
9. Risk-Aware Learning
- Learning Risk-bounded Policy:
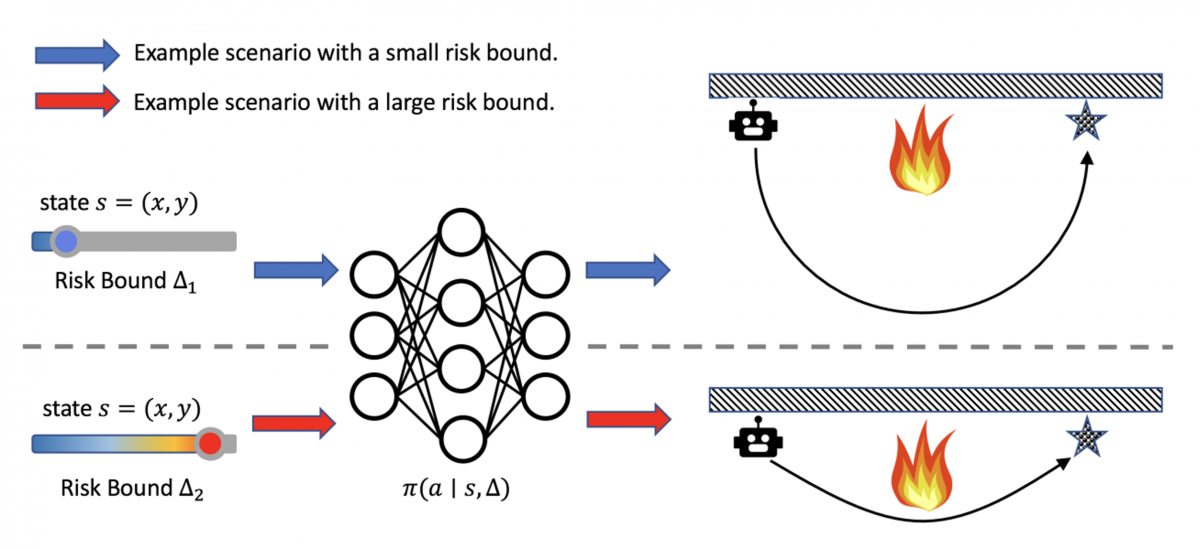
Xin Huang, Meng Feng, Ashkan Jasour, Guy Rosman, Brian Williams, "Risk Conditioned Neural Motion Planning" , IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021.
10. Codes
11. How to Cite
Ashkan Jasour, Risk-Aware Autonomy Under Uncertainty: Algorithms for Nonlinear Probabilistic Planning, Control, Optimization, Estimation, and Learning Under Uncertainty for Autonomous Systems", https://jasour.mit.edu/risk-aware-autonomy-under-uncertainty, 2024.
@book{RAutonomy,
title = "Risk-Aware Autonomy Under Uncertainty",
subtitle = "Algorithms for Nonlinear Probabilistic Planning, Control, Optimization, Estimation, and Learning Under Uncertainty for Autonomous Systems",
author = "Jasour, Ashkan",
year = 2024,
url = "https://jasour.mit.edu/risk-aware-autonomy-under-uncertainty",
}